
ユニーク&エキサイティング研究探訪
No.14 知能機械工学専攻・横井浩史教授の電気刺激装置の開発
麻痺部だけでなく脳を刺激して、運動と感覚の再生を可能にする
情報理工学研究科 知能機械工学専攻
横井 浩史 教授
知能機械工学専攻・横井浩史教授の研究室が、脳卒中などで手足が麻痺した人の運動機能を回復させるための電気刺激装置の開発に取り組んでいる。横井浩史教授は世界最先端を行く精巧な筋電義手の開発者として知られるが、目下、実用化まで視野に入れて取り組んでいるのは、その筋電義手の研究から派生した電気刺激装置の開発だ。単に電気刺激で筋肉を動かすだけでなく、ダメージを受けていない脳側を活性化して、ダメージを受けた脳側の機能を肩代わりさせることを目指した装置である。
脳卒中などで、脳の中の運動機能や感覚機能をつかさどる部分(運動野や感覚野)がダメージを受けると、ダメージを受けた脳部分が支配している身体部分(手や足など)が動かなくなる。しかし、末端の手や足、それに途中の筋肉や神経回路はダメージを受けていない。そこで、その回路に電気刺激を加えて、手や足を動かすような試みは従来からある。ただ、それだけだと、電気刺激をやめれば、もとに戻ってしまう。
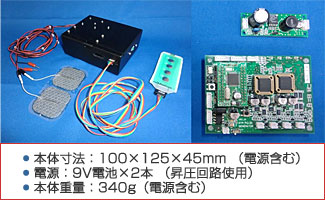
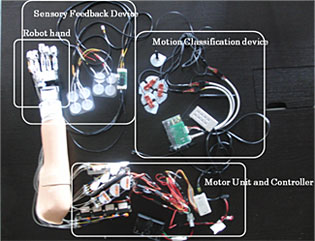
- 図1(写真).試作した持続型電気刺激装置
横井教授らの電気刺激装置は、そうした従来型の電気刺激とは一線を画すものだ。電気刺激を、動かない筋肉だけでなく、正常な脳部分にも届け、その正常な脳部分がダメージを受けた脳部分を肩代わりするように学習させようというのが特徴である。
すでに横井教授らはこの装置(図1(写真))を10セット試作、福井大学医学部付属病院や福井総合病院などの協力を得て、実際の効能をテストしている。まだ症例は多くないが、これまでのところ極めて良好な結果を得ているという。
筋電義手の触覚センサがヒントに
この電気刺激装置開発のヒントを得たのは、筋電義手(囲み記事:「最先端をゆく筋電義手の開発」参照)の研究からだという。横井教授の筋電義手(ロボットハンド)には指先に触覚センサがついており、指先が何かに触ったら、触ったという信号が脳にフィードバックされる。その触覚センサからの信号を、脳はどのように受け止めているのか。それを知るために被試験者にMRI(核磁気共鳴画像装置)の中に入ってもらい、右腕の筋電義手をMRI装置の外で動かし、その義手の動く映像を被試験者が見えるような試験環境で以下のようなテストをしてみた。
まず、触覚センサのフィードバックを被試験者の右腕に返した場合、当然ながら右手側の脳(実際には左脳が右半身、右脳が左半身を支配しているが、混乱を避けるため、右側を支配する脳は右手側の脳と呼ぶ、以下同様)に反応が現れる。
ところが、触覚フィードバックを左腕に返してやっても、右手側の脳に反応が出て来たという。これは、被試験者が、右手のロボットハンドが掴んだのを見て、当然触覚フィードバックが右腕に戻ってきたと錯覚するためだという。そこで、横井教授らは触覚フィードバックを試験者のおなかに返してみた。おなかの場合、最初は脳に何の反応もなかったという。しかし、数回以上繰り返すと、やはり右手側の脳に反応が現れた。
つまり、フィードバックの位置(電極を張り付ける位置)が左腕であろうと、おなかであろうと、右手のロボットハンドで握ったというのを、目で見て、そのイベントに関連して戻る触角フィードバック信号は、右手側の脳を活性化させたことになる。
このテスト結果を踏まえて、横井教授らは、外部からの電気信号によって、脳に影響を与えて脳の働きを変えることができるのではないかと考えた。その結果が今回の電気刺激装置の開発につながった。
痛みのない最適な刺激信号を探す
まず、どんな電気刺激ならば、動かない手や足を最もよく動かして、かつ脳が反応するのか。刺激信号の周波数が問題になるという。
皮膚表面に電極パッドを張り付けて電気刺激をする場合、人体が反応できる周波数はせいぜい~200Hzまでだという。問題は、その低周波の信号をそのまま印加すると、人間は痛みを感じてしまうことだ。皮膚表面の電圧降下が痛みの原因だとされる。痛ければ、脳は忌諱反応を示し、学習するどころではなくなる。
一方、~数kHzと高い周波数の電気信号は、人体を透過してしまうので、痛みを感じないという。
そこで、kHzオーダーの搬送波周波数(キャリア周波数)を100Hzオーダーの刺激周波数(バースト周波数)でFM変調したものを刺激信号に用いる方式が考え出された。それだと、痛みなく継続的に電気刺激をかけられるという。刺激信号は正弦波ではなく、矩形波である。
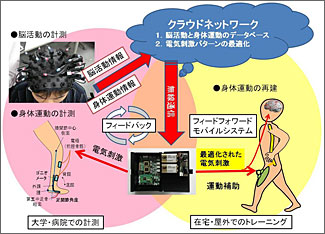
- 図2.持続型電気刺激装置を用いた運動機能回復の概念図
- (新しいウィンドウが開きます)拡大図(jpg:78KB)
もう一つ、脳の慣れの問題も解決した。同じ信号をかけ続けると、脳は慣れて反応しなくなるという。そこで2種類のバースト周波数を混ぜて印加する方式で、最も慣れにくい組み合わせを見つけ出している。
図2は、試作した電気刺激装置と、刺激パッド(皮膚表面に張り付ける電極)を装着した様子を示す。この装置は、PCからの指令でパラメータ(キャリア周波数、バースト周波数、それにデューティ比)を変えられる。デューティ比は、バーストを印加している時間とその周期の比で、このデューティ比で電流が流れている時間(実質的な刺激の強さ)を制御する仕組みだ。症状や体格等で個人差があるので、被験者は、事前にMRIなどで調べて、自分の脳や動かない部位が最もよく反応するパラメータを探索・抽出して、そのパラメータを用いて刺激する。
実際のテストで高い改善効果を実証
横井教授らは、福井大学医学部や福井総合病院などの協力を得て、MRI およびPET(ポジトロン断層法)で被験者の脳を観測しながら、この電気刺激装置の効果をテストしてきた。
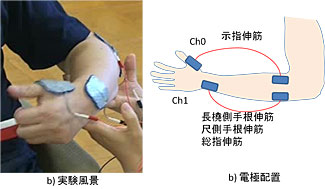
- 図3.持続型電気刺激装置を用いた手指開閉動作のテストの様子
たとえば、脳卒中で左半身麻痺になり、6年間左半身が動かなかった人の、左手を伸ばす筋肉(伸筋)位置にパッドを張り、電気刺激をかけたてみた。図3にそのテストの様子を示す。この被験者の場合、刺激電圧14.7V、キャリア周波数2kHz、バースト周波数100Hz、デューティ比50%の刺激パラメータを用いた。テストは正常な側の手でスイッチをオン・オフし、それに同期して麻痺側の手を開閉するように行った。この訓練を10回、2分間程度実施した後、電気刺激なしで麻痺側の手指の開閉を行ったところ、10回以上連続で開閉でき、しかも効果が2日間続いたという。
この症例の脳の働きをPETで確かめたところ、ダメージを受けてない側の脳が、麻痺側の手を動かそうと働くことが確認できたという。効果が2日間しか継続しなかったのは、元々の神経支配が勝っていたためで、元の神経支配を打ち消すほど強い反応が出て初めて、恒常的に新しい経路が出来上がるのではと横井教授は考えている。そのために、電気刺激は1回だけではなく、1週間とかそれ以上必要なのだろうと言う。ただし、電気刺激をどれだけの期間加えればいいのかは、まだわかっていない。
このほか、脳卒中で半身が麻痺し、歩行が不自由になった初期の人や、回復期の人などの歩行訓練のサポートにこの電気刺激装置を適用した例でも、現場の医師や医学療法士が、「通常よりも明らかに回復が早い」と驚くほど、高い改善効果があったという。
企業へのライセンスのほかに自ら事業化も目指す
国内には脳卒中等で身体が不自由になる人が毎年180万人いるという。このうち脳幹や延髄にダメージを受けている人や、長期間動けずにいて、筋肉そのものが弱りすぎているような人には、この電気刺激装置は効果が期待できない。しかし、それ以外の人への効果は大いに期待できそうである。
横井教授らは、この技術を「持続型筋活動を誘発する神経刺激装置」として特許出願済みで、国内だけでなく海外でもこの技術の普及を目指すべく、海外特許の取得も準備中だ。
国内では、すでにシステムインスツルメンツ社が、自社のリハトレーナーという運動用椅子に併用するために、電通大とライセンス契約してこの電気刺激装置の製品化に動いているという。横井教授は、この電気刺激装置を広く病院用にも普及させるため、さらに症例を積み上げるなどして、薬事法を通し、できれば会社を設立して事業化を進めたい考えだ。
(2012年3月)
- 写真A:横井研究室の筋電義手

- 写真B:筋電義手の様々な動作例
- (新しいウィンドウが開きます)拡大図(jpg:91KB)
- 囲み記事:
最先端をゆく筋電義手の開発 -
本文で紹介した電気刺激装置は、脳がダメージを受けた人の運動・感覚回復補助を目指すが、逆に脳が正常なのに何らかの理由で手がない人向けに、手の代替を目指すのが筋電義手だ。横井教授は北大時代から一貫して筋電義手の開発に携わり、きわめて精巧な筋電義手を開発している。
筋電義手は、義手(ロボットハンド)を、前腕または断端部から検出した筋電位信号を使って動かす。つまり、外部制御ではなく自分の脳からの信号でロボットハンドの手指を動かす。筋電位センサとは一つのセンサに二つの電極が付いていて、その間の電位差を検出するセンサだ。
ロボットハンドの手指を、手指のごとく動かすには、手指を動かしているすべての筋肉(30本近くある)個々に筋電位センサをつけ、個々の筋肉への信号成分を直接検出する必要があると考えがちだが、そうした解剖学的アプローチはうまくいかないという。横井教授らはまったく違う方法を採った。
手指の筋肉を動かそうとする脳からの信号は、すべて前腕を通る。そのため、前腕部の皮膚表面には内部の多数の筋肉組織を通るすべての生体信号(電気信号)の重畳された信号が出てくる。問題は、重畳された生体信号の中からいかにして有意な信号を取り出し、それを所望の手指の運動に結び付けるのか。
横井教授らの開発した手法は、2個または3個の筋電位センサで生体信号を検出する。その信号をフーリエ変換した信号から、利用者ごとの特徴ベクトルを抽出し、機械学習によりそれと手指の動きを対応付けて、ロボットハンドを制御する方式である。この手法は筋電義手の基本特許になっている(「個人適応型生体信号被動機制御システム及びその制御方法」特許第4517537(特願2001-153110)など)。3個の筋電位センサを使えば、それを15種類の手指の運動に識別できるという。
これまでいくつもの筋電義手を製作してきた(写真A)が、その典型的な例では、5指の独立動作はもちろん、ジャンケンをしたり、ペンを握って字を書いたり、茶碗を持ったり、手首の回転機能を使ってドアの回転ノブを回したりできる(写真B参照)。精巧なモデルでは、机上のコインを拾い上げることもできるという。
ただ、せっかく精巧な筋電義手ができても、今のところ利用者は極めて少ない。理由の一つは価格が高いためだ。
しかし、横井教授は「機構部分が安くなってきたので、世界で売られている価格(1000万円台の製品ある)よりも2ケタ安く作れる見通しが出てきた」と言う。当面、9モータでロボットハンドを駆動する筋電義手の価格を、装飾用義手と同等の価格帯まで安くすることが目標だ。破格の値段にすることで「現在装飾用義手をつけている人(国内に年間1000人程度いる)や、東南アジア、中国などで、このロボットハンドを使ってもらえるようにしたい」と意欲を燃やしている。
- 図1(写真):試作した電気刺激装置
- 図2:持続型電気刺激を用いた運動と感覚の再生法。あらかじめMRIなどで脳が感じる信号を調べて、その信号で刺激する。
- 図3:持続型電気刺激を用いた手指開閉動作のテストの様子。
- 写真A:横井研究室の筋電義手
- 写真B:筋電義手の様々な動作例
- プロフィール
-
1993年北海道大学工学研究科精密工学専攻博士後期課程修了、博士(工学)。産業技術総合研究所(産総研)から北海道大学助教授、東京大学准教授を経て、2009年から現職。
本文で紹介のように、人体機能の補助と代替の両面から医用福祉機械・技術の開発研究に取り組む。研究者としてスタートを切った産総研の時代に、一体何が日本のために役立つ研究なのか、根本から考えたという。結果「人間の機能を最大限に引き出せるような技術ができることが、非常に長い目で見たときに日本のためになる」と思い至り、それが現在の研究の原点になっている。
もともと化石の収集が趣味で、進化システムに関心を持つ。「三葉虫にしてもアンモナイトにしても、その前の時代の生き物から見ると異常な形として生まれ、他と異なる遺伝形質をうまく環境に適応して繁栄した。人間だって類人猿から見たら異常な形に過ぎないが、体毛も力もなかったから、そのハンディキャップを脳の働きで克服して他の動物を制圧できた」と言う。進化の観点から見れば、異形こそが後代の発展の芽になる。
そうした考え方から、他人と違う形質を排除したり隠したりする風潮を嫌う。「体の一部が他人と違うために不利な扱いを受けるのは許せない」と言う。とくに生まれながら手のない子供が、周りから人間じゃないという感覚で扱われるのは我慢ならないという。
今春から新たに、幼・小児用のロボットハンド開発に取り組む。要求される総重量が300g以下と、大人用に比べてはるかに軽く、それだけ難しいが、あえて難題にチャレンジする。生まれながら手のない子に、二つの生き方の選択肢を与えたいという。その一つはロボットハンドを駆使する生き方だ。幼児期からロボットハンドを脳で駆使することで、どんな異能が育つのか。そこに大きな期待と関心を寄せる。